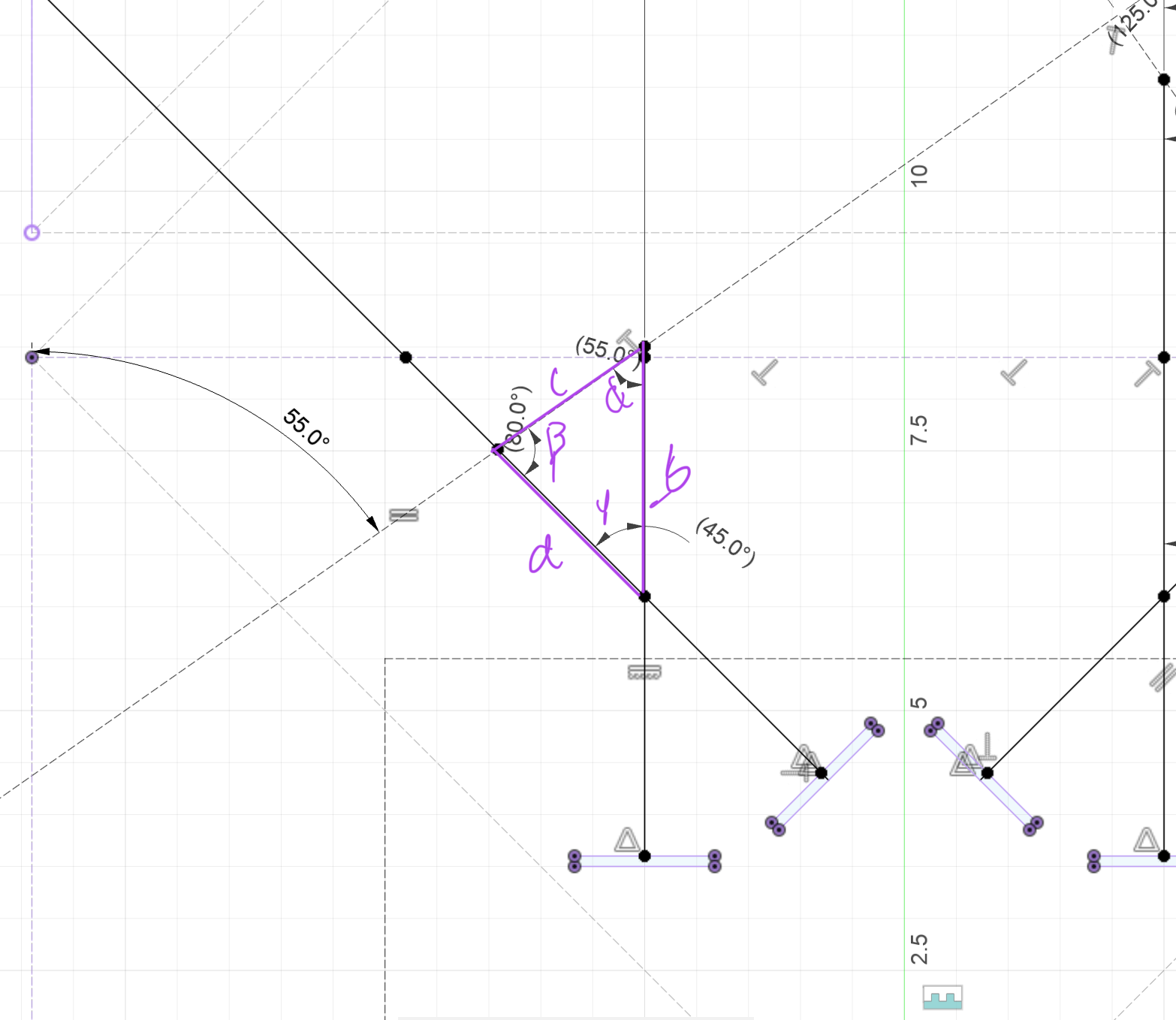
I've been trying to figure out what logic I need to determine the pose of my robot entirely from its distance sensors. Using the power of CAD, I was able to figure out what variables I knew and what I needed to solve for. Because the beams always shot out from the same place, I always know where they intersect. Fusion360 tells me that the forward-facing beam travels 25.00 mm before intersecting with the 45° beam that traveled 24.04 mm.
I've labeled the sides
I can find -ab*core::f32::SQRT_2. This should definitely save several CPU cycles.
BTW: my actual script does everything in radians, but it is definitely easier to visualize things with angles in degrees.
Next steps: create logic for mapping straightaways and diagonals. Maybe even creating a serial program to watch the map it creates.